第9回:セーフティ・レーザスキャナとは
IDEC セーフティテック エキスパートチーム

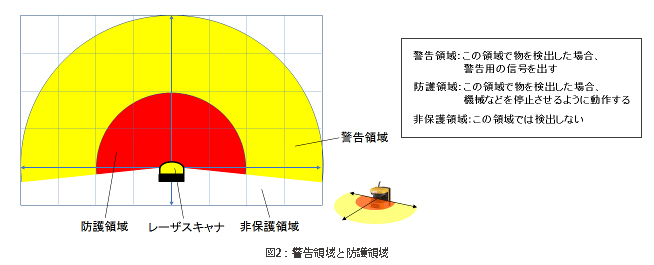
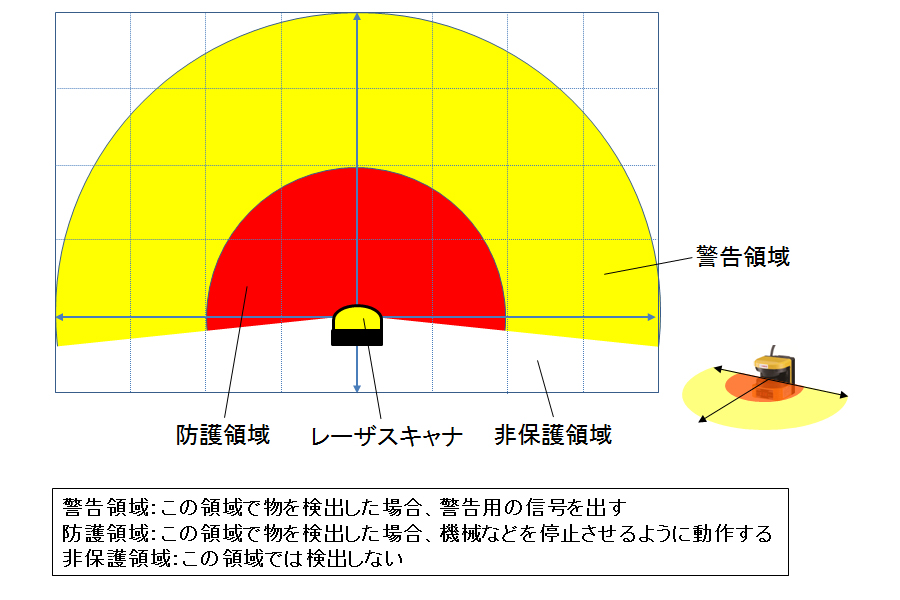
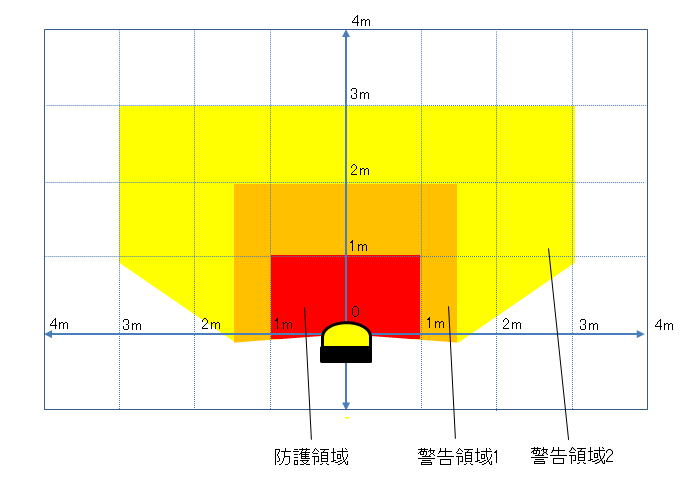
セーフティ・レーザスキャナは、生産現場において人やワークなどが近づいたことを検出するための安全機器です(図1)。検出対象が警告領域(図2の黄色の領域)に進入すると、警告用の信号を発し、セーフティ・レーザスキャナに接続されているブザーの音や表示灯の光を通じて人に注意を促します。さらに、防護領域(近づくと危険と判断される領域)まで近づくと、それまで機械の稼働を許可していた出力信号をオフにして、機械を停止させます。
セーフティ・レーザスキャナによっていったん機械を停止させると、検出対象が防護領域内にとどまっている間は、機械の稼働を許可する信号もオフの状態を維持します。従って、検出対象が防護領域の外に出ない限り、機械は再起動しません。
警告領域の設定には自由度があり、複数の場所を警告領域として設定することや、警告領域を全く設けないことも可能です。
距離検出の原理
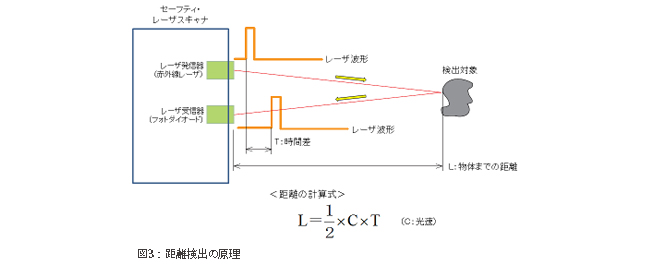
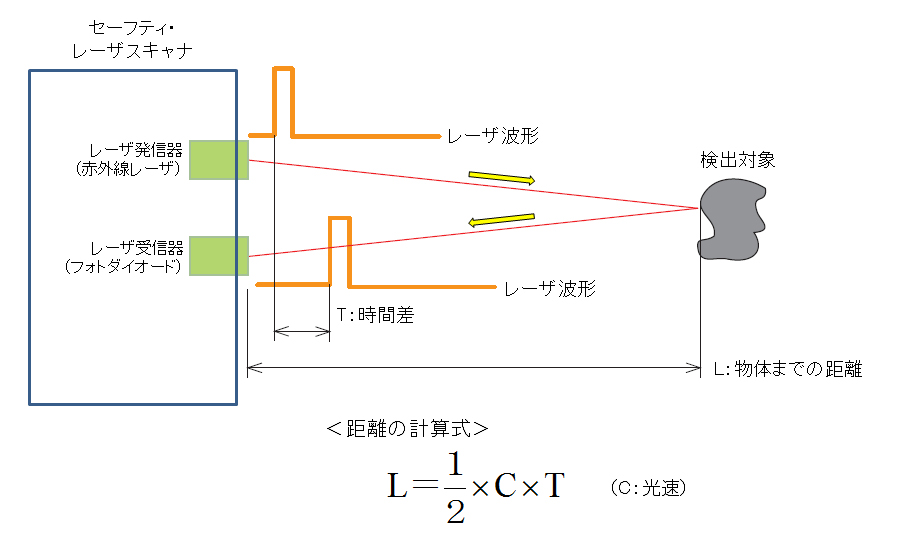
検出には、波長が約905nmの赤外線レーザを用いるのが一般的です。赤外線ですので、人の目には見えません。仮に光が目に入っても安全なエネルギレベル(クラス1)のレーザを使用しています。
レーザは、扇状に少しずつ角度を変えながら照射されます。連続波ではなくパルス波です。レーザがセーフティ・レーザスキャナ本体の発信器から照射され、検出物体に当たって反射し、セーフティ・レーザスキャナ本体の受信器に戻るまでの時間を測定することで、検出物体までの距離を算出します(図3)。
検出領域の設定
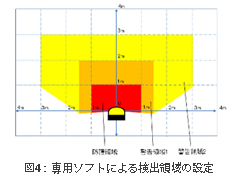
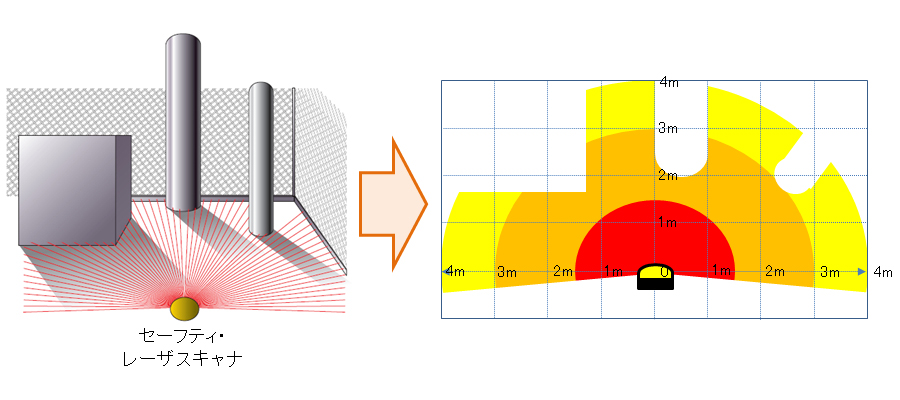
一般に、警告領域や防護領域といった検出領域の設定は、専用のソフトウエアで行います。ソフトがインストールされたパソコンとセーフティ・レーザスキャナを接続することで、パソコンの画面を見ながら任意の形状を検出領域として設定できます(図4)。さらに、いったん現場の状況をスキャンした上で、そのデータに基づいて検出領域を設定することも可能です(図5)。
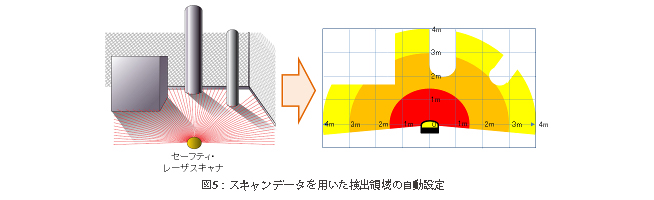
検出領域を設定する際は、検出可能な物体の大きさの最小値(最小検出物体)に注意が必要です。セーフティ・レーザスキャナでは、光源からの距離が遠ければ遠いほど、小さい物体を検出しにくくなります(最小検出物体が大きくなります)。最小検出物体については、防護領域の外周部で直径70mm程度という目安があります。この直径70mm程度という目安は、衣服を含む人の足首の大きさを想定したもので、人の進入を確実に防ぐためにこうした基準となっています。
セーフティ・レーザスキャナの使用方法
以下、セーフティ・レーザスキャナの使用方法を目的(用途)ごとに説明します。
<一定領域内の存在検出>
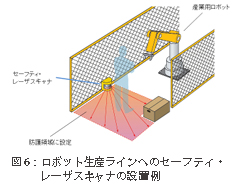
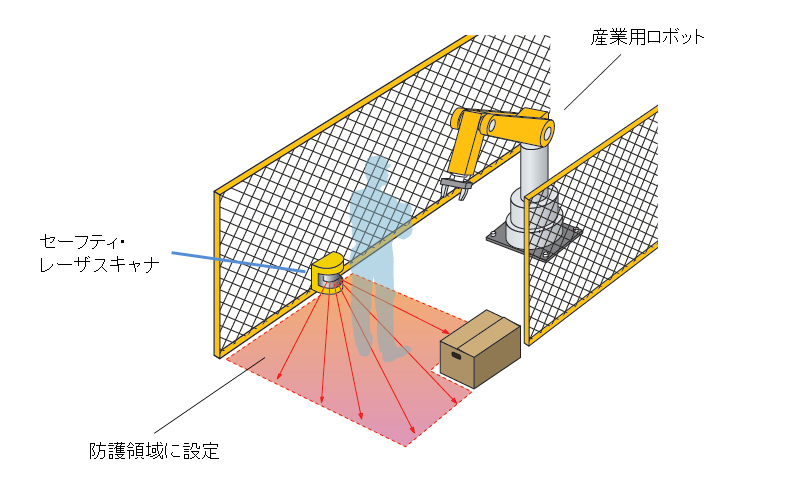
セーフティ・レーザスキャナの一般的な使用方法は、一定の領域を検出対象として、その領域内で人や物の存在を検出することです。例えば図6に示したようなロボットにワークを供給する生産ラインでは、赤色で示した部分を防護領域として設定します。これにより、ワークをセットするために人が防護領域に入ったらロボットが停止するという制御が可能になります。
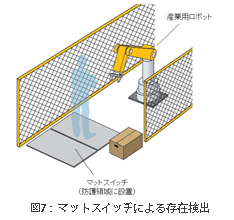
これと同じ目的のためにマットスイッチという安全機器を使う場合もあります(図7)。マットスイッチは中空構造になっており、垂直方向に荷重がかかるとマット内側に付いている上下の電極同士が接触して電流が流れるので、人や物の存在を検出できます。しかし、以下の点でレーザスキャナの方が検出性能に優れています。
■マットスイッチは、重いワークが落下した場合などに破損する恐れがある
■マットスイッチは一般に矩形なので、防護領域が複雑な形状の場合に対応しにくい
さらに、前回紹介したセーフティ・ライトカーテンも同じ目的で使用できます。ただし、セーフティ・ライトカーテンは、投光ユニットと受光ユニットの間にある部分が検出領域になるという構造上、やはり防護領域が複雑な形状の場合に対応しにくいという制約があります。
<存在検出および扉の開閉検出>
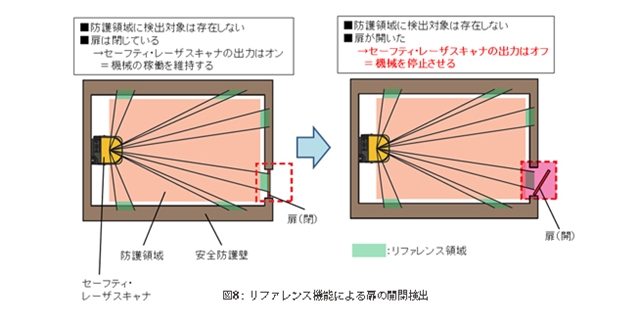
セーフティ・レーザスキャナの中には、防護領域周辺の特定の領域(以下、周辺領域)にある物体について、セーフティ・レーザスキャナ本体から物体までの距離の変化(以下、距離変化)を監視できる機種があります。この機能を「リファレンス機能」といいます。
リファレンス機能を用いることによって、扉の開閉や安全柵の変形といったことを把握できます。例えば、扉の位置をリファレンス機能を適用する領域(リファレンス領域)に設定すると、扉の開閉を検出できるわけです(図8)。この場合、人が扉を開けて中に入ろうとすると、扉が開いたことをセーフティ・レーザスキャナが検出し、機械を停止させます。
さらに、リファレンス領域を防護壁の一部にも設定しておけば、ワークなどセーフティ・レーザスキャナに当たって本来の固定位置からズレたり防護壁が変形したりした場合にも、壁までの距離変化が検知されるので、機械を停止させた上で保守が必要であることを知らせることが可能になります。
<ミューティング機能>
セーフティ・ライトカーテンと同様に、セーフティ・レーザスキャナにもミューティング機能があります。ミューティング機能とは、ワークを自動で危険区域に搬入するような生産ラインにおいて、ワークはそのまま通過させ、間違って進入しようとする人などだけを検出するための機能です。
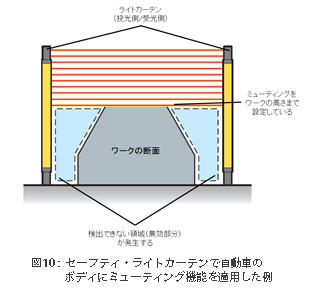
自動車のボディに、セーフティ・レーザスキャナおよびセーフティ・ライトカーテンでミューティング機能を適用した例を、それぞれ図9と図10に示しました。このような台形状のワークの場合、セーフティ・レーザスキャナの方が無効になる領域が少ないので、安全性を高められます。

AGVの安全走行への応用
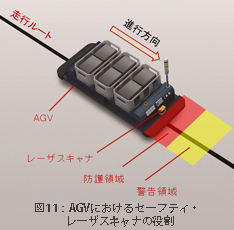
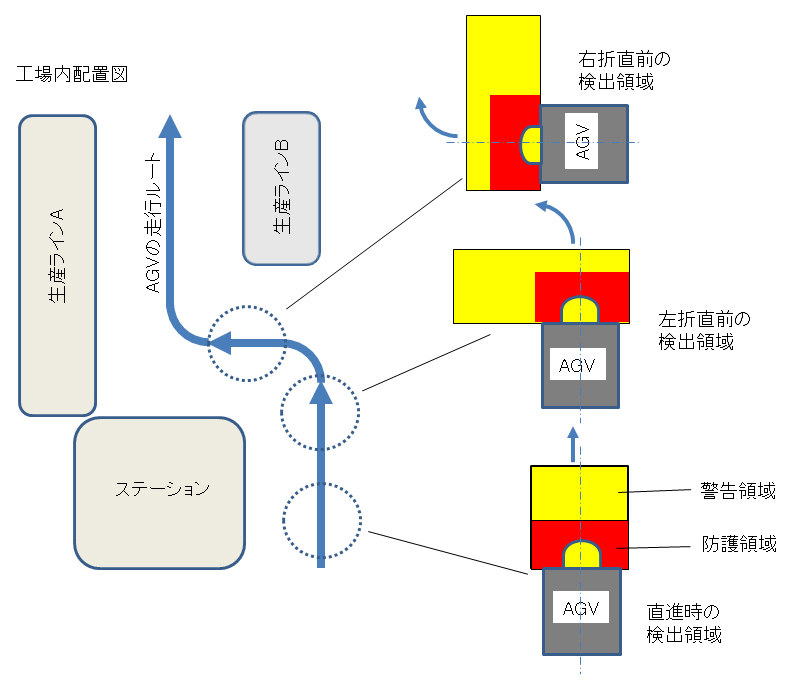
セーフティ・レーザスキャナを応用した例として、工場の自動搬送機(AGV:Automatic Guided Vehicle)が挙げられます(図11)。AGVは、工場の床に敷かれている磁気テープに沿って無人走行する搬送機です。
AGVでは、安全を確保するために、セーフティ・レーザスキャナで前方に障害物や人がいないかどうかを常に監視しながら移動します。警告領域に人がいた場合はAGVを減速させ、さらに防護領域に人が進入してきた場合はAGVの動力を遮断するなどして停止させます。人などとの衝突を防ぐには、安全距離に基づいて防護領域を設定する必要があります。ここでは詳細を割愛しますが、「AGVの速度」と「停止するまでに必要な時間」を考慮した特定の計算式を用います。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
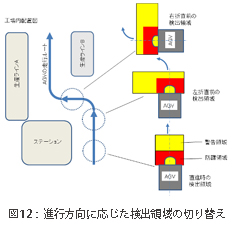
走行中に進行方向が変わる際には、それに応じて検出領域も切り換えます(図12)。こうした制御を実現するには、走行ルートに応じた検出領域パターンをあらかじめ作成し、セーフティ・レーザスキャナに記憶させておく必要があります。
使用上および設置上の注意点
セーフティ・ライトカーテンの場合と似ていますが、以下のような点に注意が必要です。
■蛍光灯、太陽光や赤外光などが光学窓に直接入らないようにする
■光学窓に水滴や汚れが付かないようにする
■検出領域の近くには反射率の高い壁などを設置しない(誤検出の原因になる)
今後の技術動向
今回のセーフティ・レーザスキャナや前回のセーフティ・ライトカーテンは、いずれも2次元(面)の検出です。今後は、技術の進歩とともに3次元(空間)の存在検出技術の適用が進むものと考えられます。例えば、レーザスキャナでも3次元検出用途のものがありますし、カメラ(イメージセンサ)を用いた3次元検出機器も実用化されてきています。こうした技術が、安全分野にも広がってくるでしょう。
今回までは数ある安全機器のうち、状態を検知する「入力機器」を取り上げてきました。次回からは、「入力機器」の信号を受けて適切な制御を行うための判断に使える「論理機器」を紹介していきます。