第7回:イネーブルスイッチとは
IDEC セーフティテック エキスパートチーム
図1のような高度に自動化された生産設備は、人が介在する必要がないように見えます。しかし、図2に示したように、設備の立ち上げ時/変更時/ロボットのティーチング作業時などは、人が安全柵の中(危険区域)に入り、ロボットアームをはじめとする可動部の近くで手動運転操作を行うなどの作業が多数あります。そうした状況において安全を確保するために有効なのが、3ポジション・イネーブルスイッチ(以下、単に「イネーブルスイッチ」と表記)です。
危険区域内での人の作業は、通常運転時よりも災害リスクが高くなります。イネーブルスイッチは、ロボットのティーチング・ペンダントなど携帯型操作機器に組み込まれる安全機器で、必要な場合だけ機械の手動運転操作を許可する他、とっさの場合は機械を停止させることも可能です。
イネーブルスイッチの動作と使用方法
代表的なイネーブルスイッチを図3に、イネーブルスイッチが組み込まれた操作機器の例を図4に示します。イネーブルスイッチは、ボタンを手で握って押し込むように操作します。

ボタンが3段階で動く
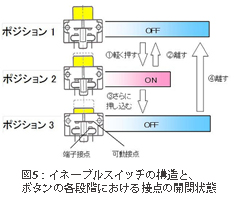
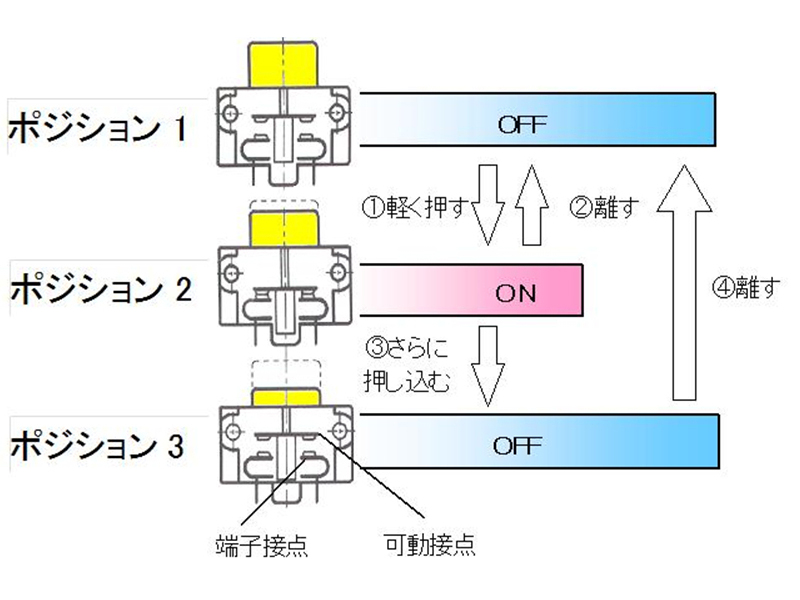
一般的なスイッチではボタンの動く位置がオン/オフの2つであるのに対し、イネーブルスイッチではボタンが3段階で動きます。図5に、各段階の接点の開閉状態を示しました。以下、なぜそのような構造になっているのかについて説明します。
ポジション1は、ボタンを操作してない(押し込んでいない)状態です。操作者には手動運転操作の意図がありません。接点はオフで、機械には電源が供給されません。
ポジション2は、ボタンを軽く押し込んだ状態です。操作者には手動運転操作の意図があります。接点がオンになり、機械に電源が供給されます。ロボットのティーチング作業などは、この状態でのみ行えます。ボタンを操作している手を放した場合、ボタンがポジション1に戻り、機械への電源供給が遮断され、機械は停止します。
ポジション3は、ボタンをいっぱいに押し込んだ状態です。このとき接点はオフになり、機械への電源供給が遮断され、機械は停止します。
なぜポジション3があるのか
手動運転操作のことだけを考えれば、ポジション1と2だけで事足りるように思えます。それでは、なぜポジション3が設けられているのでしょうか。それは、予期せぬ危険な事態が発生した場合における人間の反射的な動作を考慮しているからです。
手動運転を行う場合、作業者はボタンを押し込んでボタンのポジションを1から2に動かします。ポジション2の位置でボタンを保持している間だけ手動運転が許可されます。この状況で機械の故障など予期せぬ事態が発生した場合に、作業者が反射的にペンダントを放り出しても(ボタンのポジションが2から1になっても)、逆に作業者が反射的にボタンを強く押し込んでも(ポジションが2から3になっても)接点はオンからオフに変わり、電源供給が遮断されて機械が停止するので、作業者の安全を確保できるのです。このことが、ポジション3を設けている理由です。ちなみに、ボタンがいったんポジション3まで押し込まれた場合、その後で手を離しても、回路はオフのままボタンはポジション1まで戻るようになっているので、途中で機械が動き出す心配はありません。
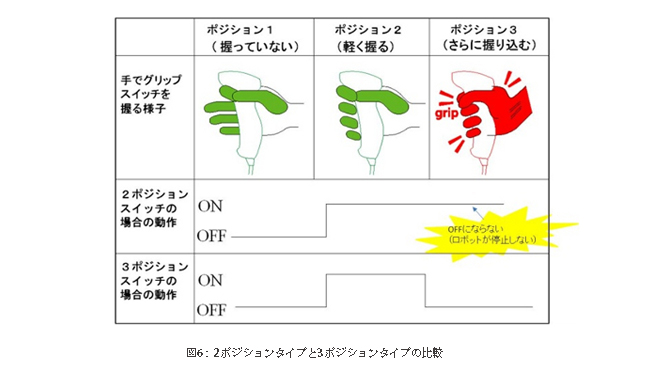
世の中には、ポジション1と2しかないイネーブルスイッチ(2ポジション・イネーブルスイッチ)も存在します。しかし、2ポジション・イネーブルスイッチでは予期せぬ危険な事態が発生した場合に作業者が反射的にボタンを強く押し込んでしまうと、機械を停止できません(図6)。従って、安全が関わる用途では3ポジションタイプを使用すべきです。
本コラムでこれまで紹介してきた非常停止スイッチは、作業者の判断と意思によりボタンを押して機械を停止させる安全機器です。それに対して、イネーブルスイッチは作業者の意図的な操作だけではなく、作業者の反射的な(無意識の)行動によっても危険を回避できるのが特徴です。
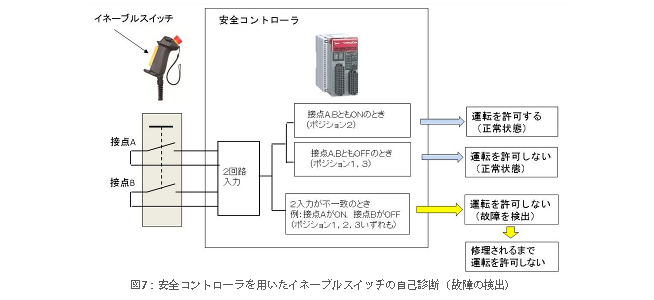
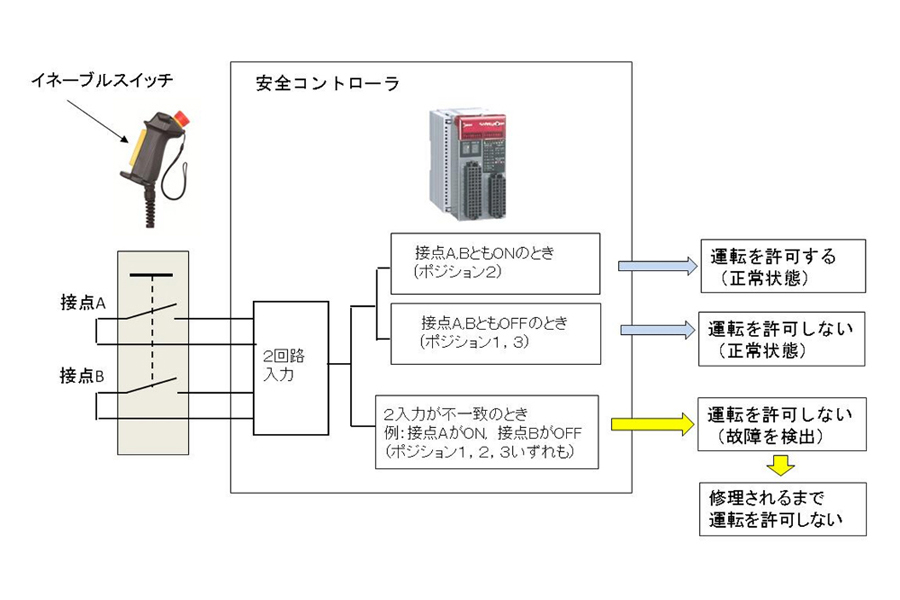
自己診断(故障の検出)
危険区域内での安全を確保するために、イネーブルスイッチおよびそれを用いるシステムには高い安全性が求められます。ほとんどのイネーブルスイッチでは接点が2重化されており、一方が故障した場合にもう一方だけで安全を確保(機械を停止)できるように、安全コントローラと組み合わせてシステムを構築します。故障の検出については、両接点の信号が一致した場合は正常、一致しない場合は故障と判断します(図7)。
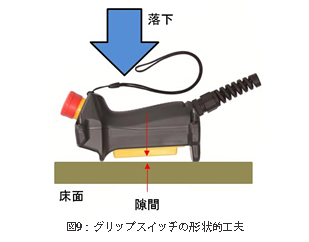
無効化の防止
他の安全機器と同様、イネーブルスイッチも無効化対策が不可欠です。ティーチングペンダントやグリップスイッチは手に持って操作するので、落下したり無造作に置かれたりした場合の衝撃で接点がオンにならないように、操作機器全体やボタンの位置・形状を工夫しなければなりません。ティーチング・ペンダントでは図8、グリップスイッチでは図9のような工夫が施されています。

{kind=link}
{kind=link}
{kind=link}
使用上の留意事項
作業者は、ティーチング・ペンダントを持ちながら安全区域から危険区域に入ります。その際、ケーブルの引っ掛かりや落下によるひび割れの恐れがありますので、取り扱いに注意します。
さらに、ティーチング・ペンダントを用いたシステムに対する留意事項として、危険区域内に作業者がいるときに、外部(安全区域)にある別のスイッチなどで機械を操作できないようにする必要があります。それには、例えば運転モードを切り替えるためのスイッチを鍵付きタイプにしておき、手動運転モードに切り替えた場合は危険区域内に入る作業者が鍵を携行することで、外部から運転モードを変更できないようにするなどの運用が考えられます。
イネーブルスイッチの今後
近年、RFID技術を応用して人にタグを付けることで、危険区域内で人を検知する技術の開発が進んでいます。しかし、そうした技術では人数や場所は検知できますが、人が危険な状態かどうかまでは分かりません。とっさに機械を停止させる必要がある用途では、今後もイネーブルスイッチが利用されるでしょう。
次回は、ライトカーテンやレーザスキャナについて解説します。